Dan
Forum Replies Created
-
AuthorPosts
-
DanKeymasterDanKeymaster
A John Deere Gator Utility vehicle might be an option. Gas powered instead of electric, much greater range.
DanKeymasterA RICOH THETA V camera can take 360 degree images for Google Street View. https://theta360.com/en/about/theta/v.html The specs say it can store “Approx. 4,800 photos”. 120km/10m = 12000 images. The simplest solution to take pictures without risking dust on the camera is to get three cameras and fill them to capacity with pictures.
For privacy reasons all faces, license plates, tattoos, and genitals would be blurred before upload to Street View.
There are two challenges with the THETA V:
* it cannot operate at or above 40c.
* it would require some system to auto-shoot every 10m. The simplest way would be to connect to an odometer on the vehicle.DanKeymaster120km is calculated by measuring satellite images of the roads, adding trash fence perimeter, and a bit more.
The BRC speed limit is 5mph (8kmh), so 120km can be scanned in ~15h. Call it 25h with interruptions. That’s 5h a day of taking turns driving the streets of BRC.
An electric motorized golf cart, new, is minimum $1500 CAD. The salesperson estimated it can drive 15km on a single charge (2 rounds of golf). That would require two sets of batteries recharging every single day, or 10 sets of batteries. ugh.
DanKeymastersame guy as who?
RAMPS is a supported board. Both traditional XY and CoreXY systems are supported in the Makelangelo firmware. So in theory everything is in place, and all you need to do is put the hardware together.
DanKeymasterKudos for getting that far. UNO and AMS1 have not been supported for a couple of years now. There are a few threads on the forums about why. Basically, UNO is too weak.
DanKeymasterIIRC you can click the LCD panel and use the pause option. I’ve done this when the pen is drying out.
You cannot connect via USB to the makelangelo while it is running. Well, you CAN but it will reboot the robot. this is a problem with ALL arduino-based devices.
Assuming you are already connected while running the robot… I imagine an M226 (pause for user input aka click the button) would do the trick.
DanKeymasterDifferent drivers and dip switch settings would affect the microstepping, which is set in configure.h around line 80
#define MICROSTEPS (16.0)
for example, if you have 1/256 microstepping, set the value to 256.
DanKeymasterCurrently, the order of lines drawn from DXF/SVG files is controlled by the software that created those SVG/DXF files. I can see how there might be a way to sort each shape by starting Y value top-down…
Also please note SVG files probably have a number of shapes that Makelangelo software can’t handle. at the moment it ignores anything that isn’t a path. rectangles, ellipses, and other types of shapes won’t be drawn.
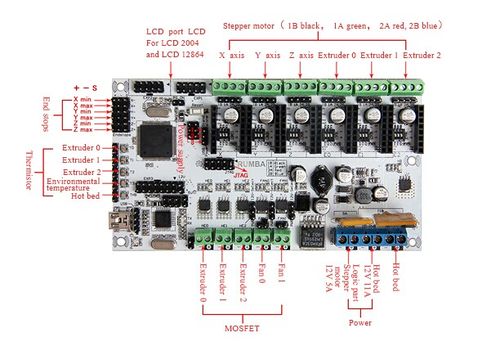
DanKeymasterIt’s hard to see in the photo, but on my boards the red stripe is on the right where it touches the RUMBA board, and also on the right where it touches the LCD.
DanKeymasterHere is a picture on the BIQU site
Still doesn’t look like your board. The CPU is missing on the left side of your board. All our units are tested before shipping. Please send me a clear photo of your board, front and back.
DanKeymasterPlease send me a clear photo of the control board. So far it does not look like a RUMBA board, which is the only model we use.
http://reprap.org/mediawiki/images/thumb/1/17/Rumba4.jpg/500px-Rumba4.jpg
This is a rumba board. Notice the differences on the left hand side.
DanKeymasterWhat is that control board? Make and model, please. The circuits in that board are unknown, which means the behavior is unknown.
Also please where did you get this machine?
DanKeymaster@vladimir My 40th birthday is coming up. For me time > money.
DanKeymasterWhat is that control board?! There’s the problem – it probably has a different pin configuration from the RUMBA.
DanKeymasterRelease 35 is out now. Please try it and report back.
https://github.com/MarginallyClever/Makelangelo-software/releases/tag/7.15.5
DanKeymasterI have found the issue. The settings panel for Boxxy style was missing. I have created a panel with a few variables and am preparing a release now.
DanKeymasterI’ve never played with this shield.
IN THEORY I would make a new file boardName.h, probably a copy of some other board.h, then change the values inside to match the new board.
HOWEVER UNO is not supported in the current firmware because it doesn’t have enough internal clocks to do all the work. It could do a really half-assed job of starting and stopping between commands, but your drawings would look bad, take much longer, and generally be more disappointing, for a lot of code maintenance headache. Bad return on investment.
Having said that, it’s only because I’m one guy. If you want to maintain support for the board, please be my guest. Send me a pull request any time.
DanKeymasterRotating the knob reboots the robot? I’ve never heard of that before! Maybe try a different power supply? The kit ships with a 12v2a supply. there is nothing wrong with getting 12v and more than 2 amps. Try a 12v3a supply, maybe that will help.
DanKeymasterFirst I would try a different USB cable. bad cable can often lead to mid-print disconnect.
If you can’t access the menu at all then the button may be broken.
First thing I’d do is replace the USB cable. Then I would make extra certain the button does/does not work. if it does not work, I would look at replacing just the screen.
DanKeymasterIt looks like you are using an older version of the firmware. Please update to the latest and let me know if that helps.
DanKeymasterswap-1.0.9, whatever library that is, has your problem. maybe remove that library? Update it?
DanKeymasterM226 is “wait for user input”. it’s waiting for you to click the button on the LCD panel. If you do not have an LCD panel you should rebuild the firmware with HAS_LCD undefined.
DanKeymasterdoes it happen in the latest version, 7.15.4? https://github.com/MarginallyClever/Makelangelo-software/releases
DanKeymasterI don’t write code support for the adafruit motor shield boards any more. If you’d like to make a pull request that adds support to Makelangelo-firmware, I will include it.
-
AuthorPosts

{kind=link}