An eccentric cam shaft is at the heart of our cycloid gearbox. Any force acting on the gearbox is focused at this point. So it makes sense that a good gearbox has a super strong cam shaft. This design is made to connect on a motor with a 1/4in diameter shaft, which happens to be the same as the NEMA23 motor in the elbow of the Sixi Robot.
Want to practice your CAD skills? Try making a 3D model of this part, yourself. Tag us on social media if you do!
As I and other devs write new features into the Makelangelo App, we push our shared code to Github where it is automatically compiled, tested, and packaged in Nightly Builds. These nightly builds have unconfirmed bug fixes, delicate new features, and that new code smell. This is so we can get and implement your feedback as quickly as possible. We recommend you try the nightly build before reporting a bug to our issues list.
The builds aren’t actually nightly – they happen any time a new copy of the code is pushed to Github. This way we have the tightest turnaround and best acceleration in class.
There are never more than 3 nightly builds. You’ll probably want to unpack this on top of an existing copy of the latest official release because the fix file will replace the one in your install.
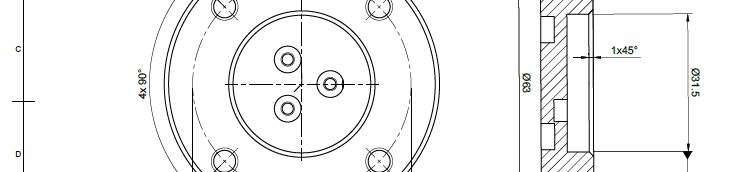
A good designer and leader knows when to say “no”. In today’s example… I have tried several times with the help of Instagram friends and my own employees to build a gripper that we can use with the Sixi robot. I decided, finally, to say No. We’re in the robot arm business, not the gripper business. If that’s true then how will Sixi hold grippers made by other people?
“ISO 9409-1:2004 defines the main dimensions, designation and marking for a circular plate as mechanical interface. It is intended to ensure the exchangeability and to keep the orientation of hand-mounted end effectors.”
Are you looking for a challenge? How about making a gripper that works with our STL model of the hand? Then it should work with all commercial robot arms that match the standard, too.
I first saw this effect used with an image of Alan Turing and the word CODE superimposed. It was many months before several disparate ideas came together and I finally rediscovered how to generate these kinds of pictures. Here now I’ll show you how I built up the Processing code to do the same.